





- Mechanics
- /
- Static
- /
- Moment of a force
The moment of a force is a measure of the tendency of a body to rotate around an axis due to application of a force.
Moment of a Force
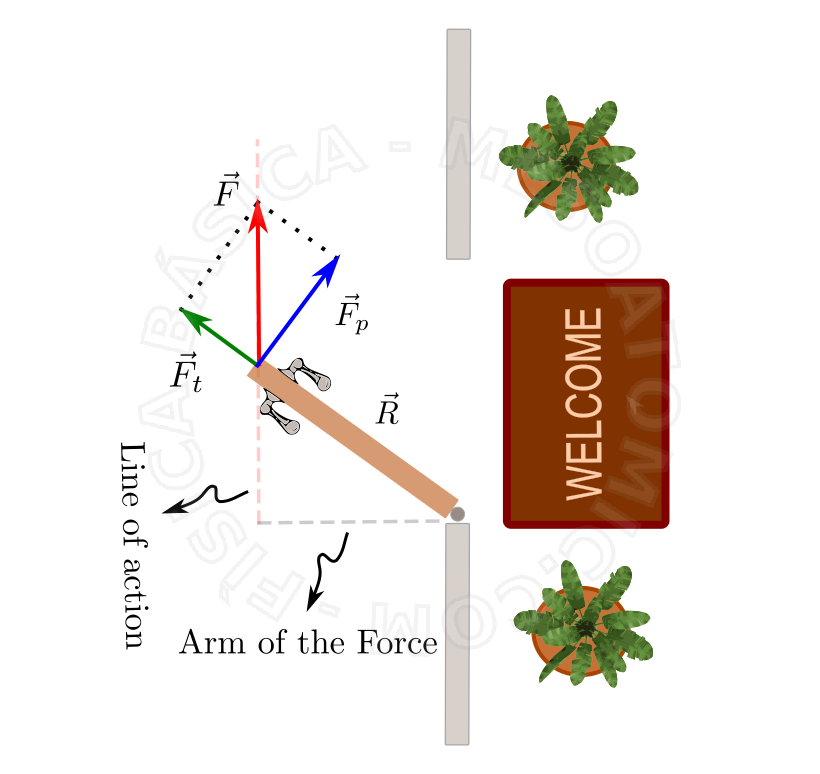
The figure above shows a force acting on the door. Depending on how it is applied, you can make the door rotate easily. For analysis of this type of problem, the following quantities are important:
- A Force Arm \((b)\)
- Given a rotation axis, the arm of a force \(b\) is the shortest distance between the axis of rotation and the force line of action.
- Moment of a Force \((\vec{\Upsilon})\)
- The algebraic value of the moment of a force, or torque, is given by the expression: $$\vec{\Upsilon} = \pm F d,$$ where \(F\) is the magnitude of the force applied to the body and \(d\) is the arm of the force on the given axis.
The following sign convention is adopted: when \(F\) tends to turn the body counter-clockwise the torque has a positive sign \((+)\) when \(F\) tends to rotate the body towards time, the torque has a negative sign \((-)\).
The units of time measurements of a force in SI is Newton times meter \([M] = N m\)
Moment of a Force as a vector product
It is possible to define the moment of a force vector through the following equation: $$ \vec{\Upsilon} = \vec{r} \times \vec{F},$$ where \(\times\) is the vector product between \(\vec{F}\) and the position vector of force \(\vec{r}\) in relation to the rotation axis. Equivalently, it is possible to write a vector product as $$ \Upsilon = F sen(\theta) r,$$ where \(\theta\) is the smallest angle between \(\vec{F}\) and \(\vec{r}\). The above figure illustrates these vectors, where the vector \(\vec{r}\) direction is parallel to the door and goes from the axis of rotation to the point where the force is applied at the door.
There is a convention for the direction of the vector \(\vec{\Upsilon}\), as the vector product makes it clear. It is always orthogonal to the system plane of rotation, and will be positive or negative according to the direction of rotation, as the convention mentioned above. That is, for a one-clockwise rotation, the vector moment of force points into the plane of rotation; in the case of a counter-clockwise motion, the vector points out of the plane of rotation.
Net Moment
The moment of a force with respect to a system axis is equal to the sum of the moments of the forces constituting the system in relation to the same axis, i.e., $$ \vec{\Upsilon}_{net} = \sum_i^n \vec{\Upsilon}_i $$ If the resultant moment of the forces acting on a rigid body is zero, it does not have rotational acceleration, or it is rotating with constant angular velocity or it is stopped. In mathematical form it is: $$ \vec{\Upsilon}_{net} = \sum_i^n \vec{\Upsilon}_i = \vec{0} $$ when there is no rotational acceleration of the body.
Binary

Binary is a system consisting of two forces of the same magnitude but in opposite directions and different lines of action, as shown above, where \(|\vec{F}_1|=|\vec{F}_2|=F\). For this system, the following applies:
- The resultant force in a binary is zero, then there is no translation of the body.
- A torque tends to produce only a rotation in the body where it is applied.
- A torque can be balanced by another torque of opposing direction.
- The sum of the moments of the applied forces is constant, and independent of any chosen axis.
The torque for the binary is \( \Upsilon = 2F \frac{L}{2} = FL\), where \(L\) is the body length. In this case \(d=\frac{L}{2}\), since in the absence of a fixed axis bodies rotate in relation to its mass center.




