Uma máquina mecânica simples é um aparato que muda a direção de uma força, ou sua magnitude. Uma máquina simples pode ser definida como o mecanismo mais simples que pode oferecer vantagens mecânicas.
Máquinas Simples
As forças que atuam em máquinas mecânicas simples podem ser divididas em:
Resistência \((R)\)
A força que se deseja vencer, ou equilibrar, com auxílio de uma máquina é chamada de resistência.
Motriz \((\Gamma)\)
A força que é necessária aplicar na máquina para se obter o efeito desejado é conhecida como força motriz ou potente.
Para uma máquina em equilíbrio mecânico, a sua vantagem mecânica é definida como a razão entre a força potente e a resistente, matematicamente: $$VM = \frac{\Gamma}{R}$$
Alavancas
A alavanca é uma barra rígida que pode girar em torno de um eixo na qual está apoiada. O eixo de rotação de uma alavanca é chamado de eixo de apoio ou fulcro.
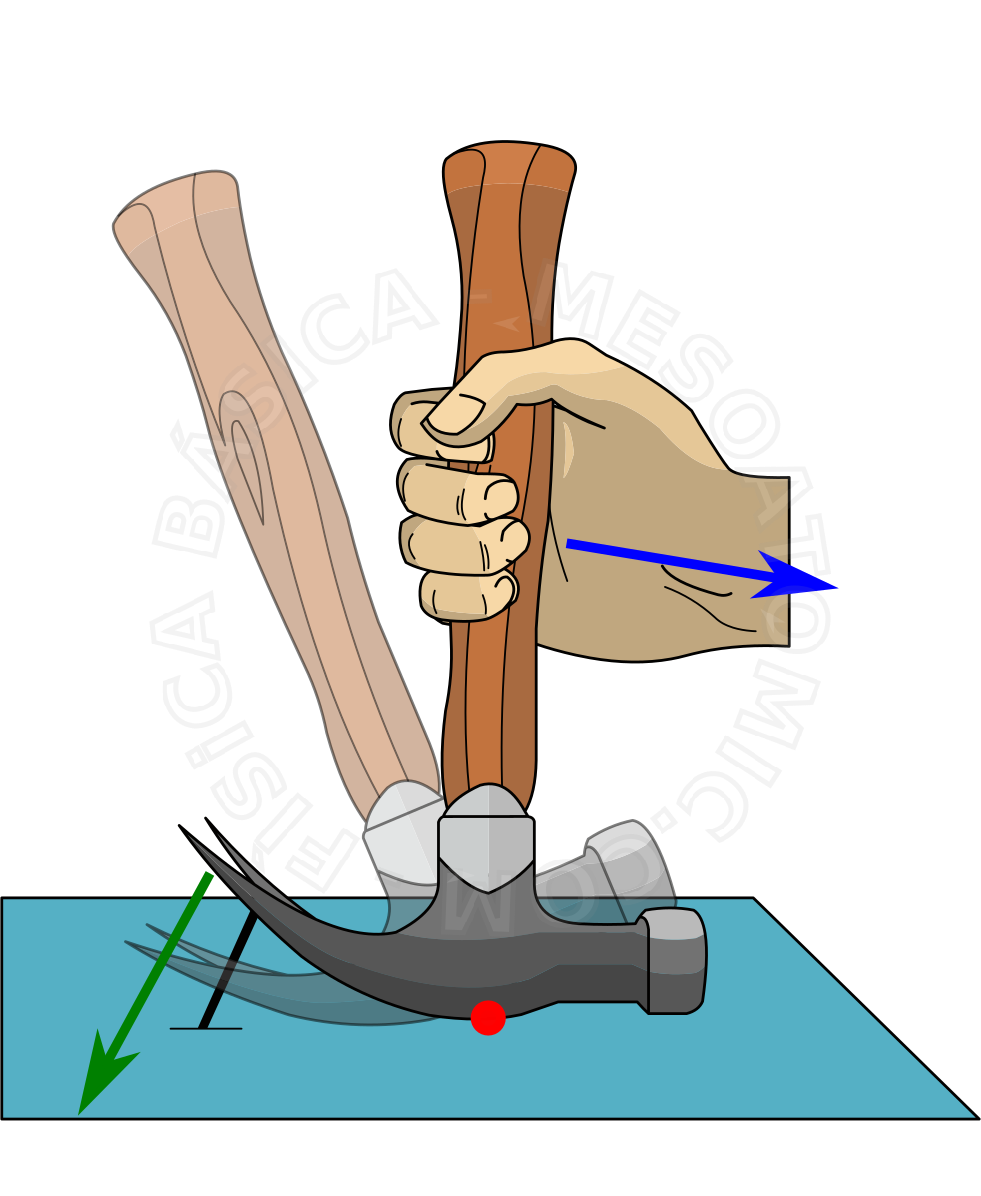
Alavanca interfixa
São alavancas onde o ponto fixo fica entre a força resistente e a potente. Ex: balanças, tesouras e alicates.
Alavanca inter-resistente
São alavancas onde a força resistente fica entre a força potente e o ponto fixo. Ex: carrinho de mão, quebra-nozes e espremedor de alho.
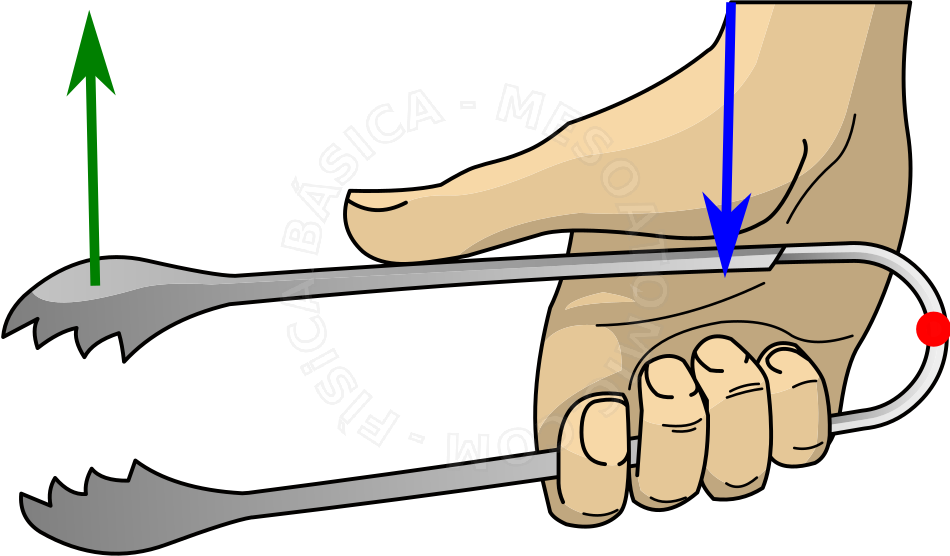
Alavanca interpotente
São alavancas onde a força potente fica entre a força resistente e o ponto fixo. Ex: pinça, pegador de gelo, vara de pescar e acelerador de carro.
A condição de equilíbrio para qualquer alavanca é: $$ R \times B = \Gamma \times b,$$ onde \(B\) é o braço da forca resistente e \(b\) é o braço da forca potente.
Polias
A polia, ou roldana, é uma peça utilizada para transferir força e movimento. Uma polia é constituída por uma roda de material rígido, que gira em um eixo, acionada por uma correia ou corda, transferindo movimento e energia a outro objeto.
Polia fixa
Condição de equilíbrio: $$\Gamma = R$$ .
Polia móvel
Condição de equilíbrio: $$\Gamma = \frac{R}{2}$$ .
Talha exponencial
É a associação de polias com apenas uma fixa. No caso de \(n\) polias móveis, a força motriz será: $$\Gamma = \frac{R}{2^n} $$ .
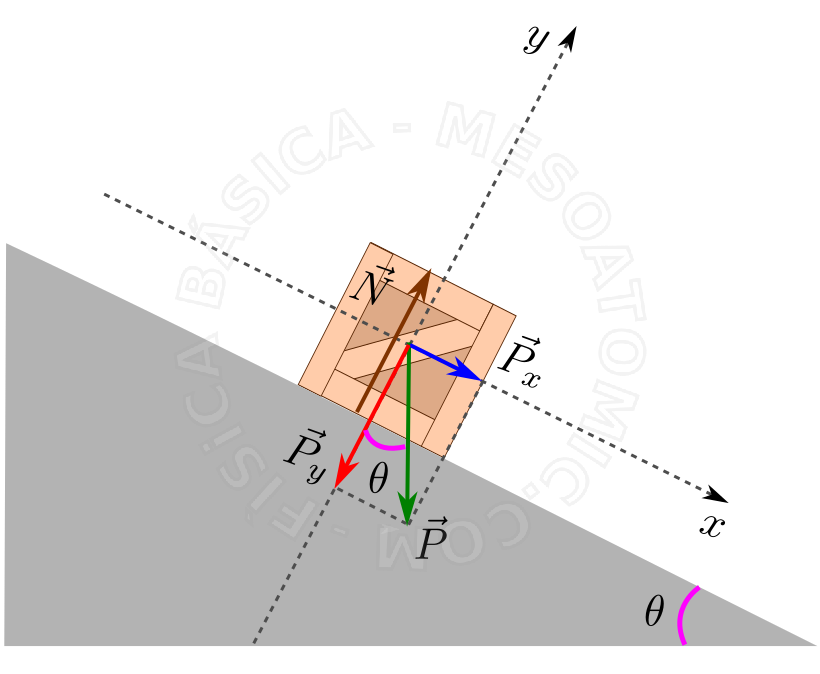
Plano Inclinado
É um plano rígido, neste exemplo suposto sem atrito e inclinado de um ângulo \(\theta\) (veja ilustração acima). A condição de equilíbrio para esta máquina é: $$ \Gamma = P sen(\theta) $$ Exemplos de máquinas que utilizam o princípio do plano inclinado: parafuso, macaco de parafuso e cunha.