





- Mechanics
- /
- Kinematics
- /
- Vector kinematics
When a movement occurs in two dimensions or more, one will need to work with vectors, i.e., one must use the vector kinematics. One example of movement in two dimensions is a car describing a circular path.
Vector Kinematics
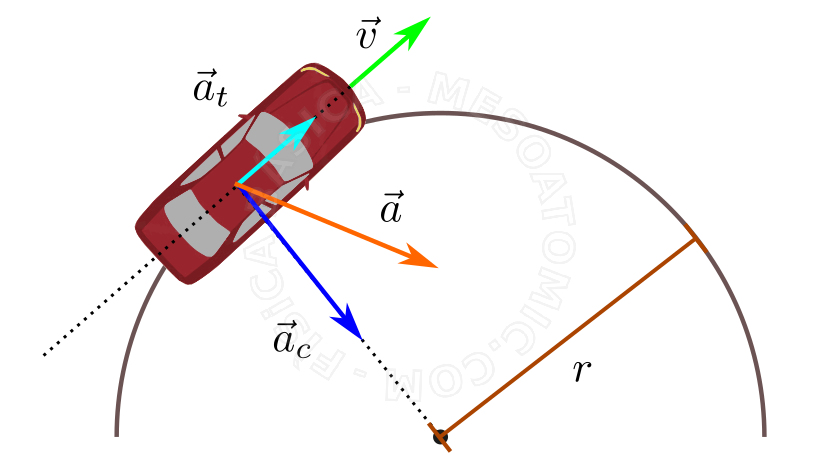
The figure above shows some vectors in a two-dimensional movement (circular path), which can be understood as follows:
- Velocity vector \((\vec{v})\)
- The velocity vector is always tangent to the trajectory at the point where the object is located and has the same direction as the motion.
- Tangential acceleration vector \((\vec{a_t})\)
- It is the acceleration component that dictates the variation of the speed module. It is in the same line of the speed, always. For an accelerated motion, \( \vec{a_t} \) has the same direction of the speed, and for a decelerating case, \( \vec{a_t} \) has an opposite direction to the speed.
- Centripetal acceleration vector \((\vec{a_c})\)
- It is the acceleration component that changes the velocity direction, and its direction is pointing towards the center of the path from the object position.
The acceleration module at a given instant is $$ a_c = \frac{v^2}{r} $$ where \(v\) is the speed module and \(r\) is the curvature radius of the path in the instant considered. - Resultant acceleration vector \((\vec{a})\)
- It is the sum of all accelerations that act on a body. Vectorially, \( \vec{a} = \vec{a}_t +\vec{a}_c \); algebraically, \( a^2 = a_t^2 + a_c^2 \).




